Vehicle Automation versus Connectivity, and What it Might Mean for Traffic
ed’s note: This week, we’re featuring a short series of articles from our board member Juan Matute on what he’s thinking about technology and transportation.
I have the opportunity to be involved in a lot of interesting research as the Associate Director of the UCLA Institute of Transportation Studies. Over the past year, I’ve been involved with our study of policy, behavioral, and market research to better understand opportunities and challenges for connected vehicles implementation.
The study’s formal title is NeTS:Large: Collaborative Research: Closing the loop between traffic/pollution sensing and vehicle route control using traffic lights and navigators, so we call it Green City Transportation Architecture. It’s funded by the National Science Foundation and is more exploratory than applied. Don’t expect to see the research project’s results become commercialized in the near term.
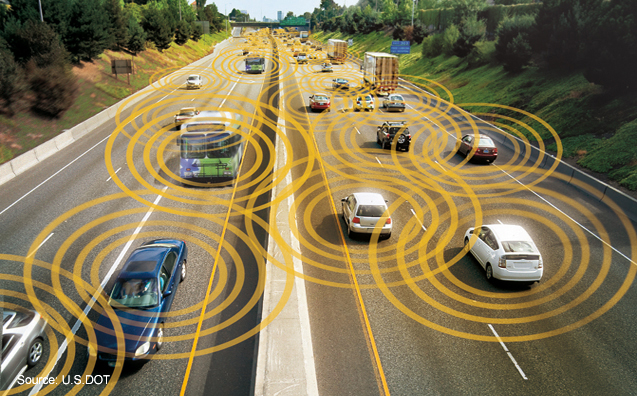
We’ve supported a team of computer scientists looking to optimize vehicle traffic flow within cities and regions through the use of connected “smart” traffic signals, a central navigation server (think Waze Plus), and a dynamic congestion charge. Implementing such a system requires vehicle-to-vehicle and vehicle-to-infrastructure connectivity, which is the focus of this article.
Vehicles must be aware of their environment in order to respond to it. Automated but unconnected vehicles are limited to one-way line-of-sight scanning to assess their environment. Connected vehicles use data connectivity to communicate with infrastructure and other vehicles, including those outside the line-of-sight, either around curves or more than one vehicle ahead. Connectivity enables data communication for an activity that’s largely dependent on visual communication (presence of vehicles, stop signs, lane paint, etc.), aural communication (honking), and a set of rules of the road. We’ve already seen the possibilities of data communication between vehicles (or their occupants’ smartphones) and central servers, but there are much greater possibilities from vehicle-to-vehicle and vehicle-to-infrastructure connectivity.
Many of the benefits that people associate with vehicle automation actually come from vehicle connectivity. Adaptive cruise control, where a trailing vehicle automatically speeds up or slows down to maintain separation from the vehicle in front of it, is a vehicle automation feature. However, the biggest increase in vehicle throughput only comes from adaptive cruise control with multi-car platoons, which requires vehicle connectivity
The benefits from vehicle automation accrue primarily to drivers. At higher levels of full vehicle automation, drivers can give less focus to the driving task, enabling them to focus on other tasks. With partial vehicle automation, features such as automated cruise control, lane maintenance, automatic overtaking, and parallel parking are primarily for driver convenience. The driver is expected to maintain focus on the driving task and be capable of retaking control of the vehicle at any time.
A few researchers are looking into whether or not drivers maintain focus on the driving task as they yield more control to the vehicle’s automated features. If drivers of the first partially-automated vehicles are less focused on the driving task, it’s probable that early experience with partial vehicle automation will show higher-than-expected rates of accidents. I’m told that the most difficult task for full vehicle automation is driving in a complex urban environment complete with pedestrians and cyclists – a dynamic which could bring a new dimension to active transportation advocacy in the future.
Selling drivers partial or full automation is easier than selling vehicle connectivity. New car buyers already see adaptive cruise control and automatic parallel parking as amenities that they can benefit from. It’s harder for a new car buyer to see benefits in vehicle connectivity if infrastructure and other vehicles are not yet connected. Governments need substantial funding in order to roll out connected infrastructure, especially connected stoplights that broadcast phase data so that a vehicle knows a light will soon turn green. Many of the system-wide throughput increases that come from a high saturation of connected vehicles will not be experienced in the near-term, as unconnected vehicles will remain on the streets for at least 20 years.
So what may happen if individual benefits accrue to drivers, as they buy partially-automated vehicles in the short-run, but capacity increases only come from major investments in vehicle connectivity in the long run? That sounds like a recipe for more traffic congestion. This result would be especially true if drivers in congested areas seek out the lane maintenance and adaptive cruise control capabilities of newer vehicles in order to delegate more of the congested driving task over to the vehicle. Such drivers would become less bothered by congestion (they could perform other tasks in the car that require only partial attention) and possibly respond by consuming additional congested travel.
We’ll be talking about vehicle automation at UCLA’s Digital Cities: Smarter Transportation Forum in downtown Los Angeles on Thursday, March 20th. Streetsblog Los Angeles readers can register for $129 using discount code “sbla”.

Streetsblog has migrated to a new comment system. New commenters can register directly in the comments section of any article. Returning commenters: your previous comments and display name have been preserved, but you'll need to reclaim your account by clicking "Forgot your password?" on the sign-in form, entering your email, and following the verification link to set a new password — this is required because passwords could not be carried over during the migration. For questions, contact tips@streetsblog.org.