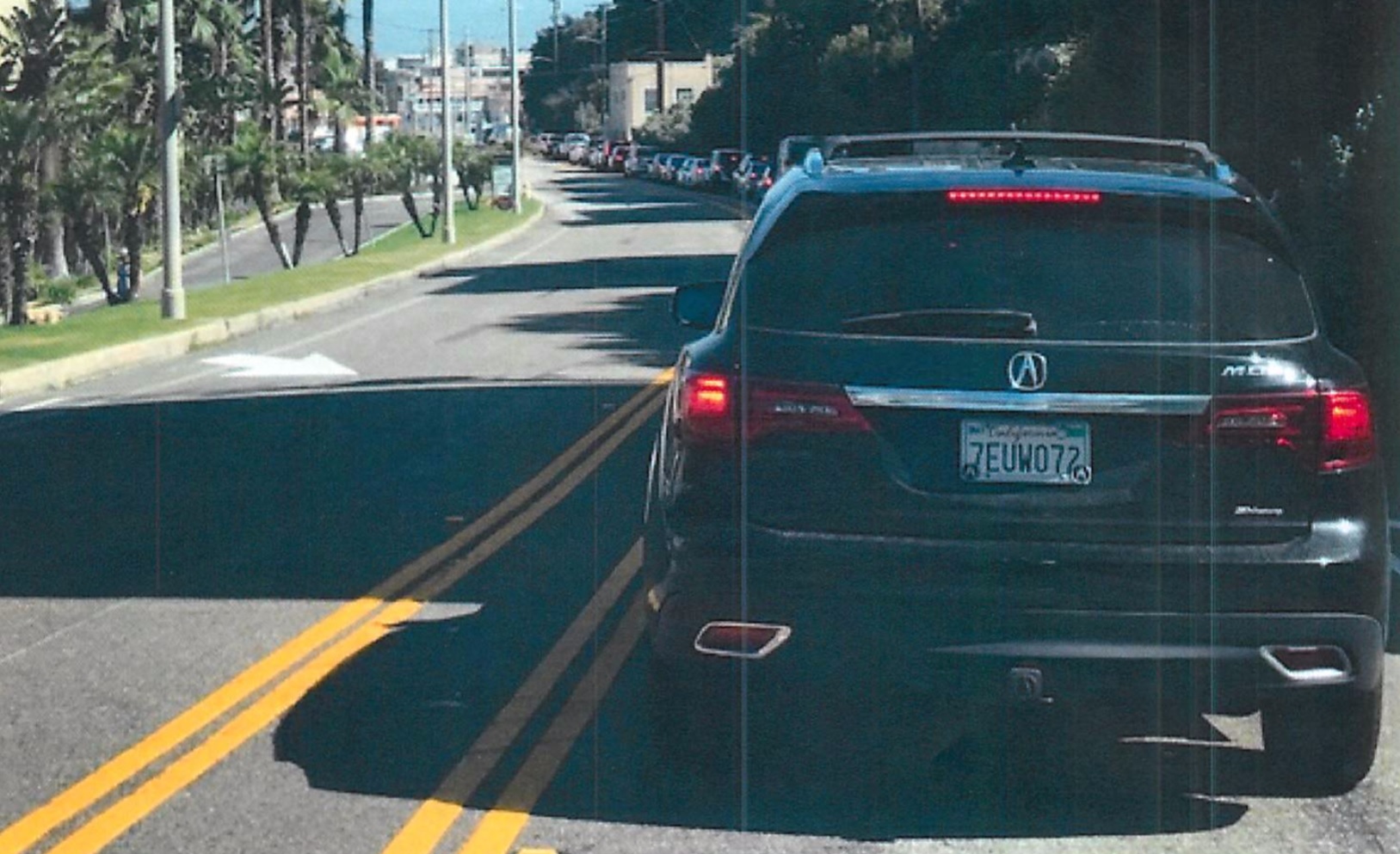
Car Congestion
How the 10 Freeway Closure is Impacting Transit Riders
As the 10 Freeway closure clogs central L.A. surface streets, Metro and L.A. City claim they are making trains go faster. Agencies haven't shared their data, but on the ground results don't seem to validate claims of significant gains.
November 17, 2023





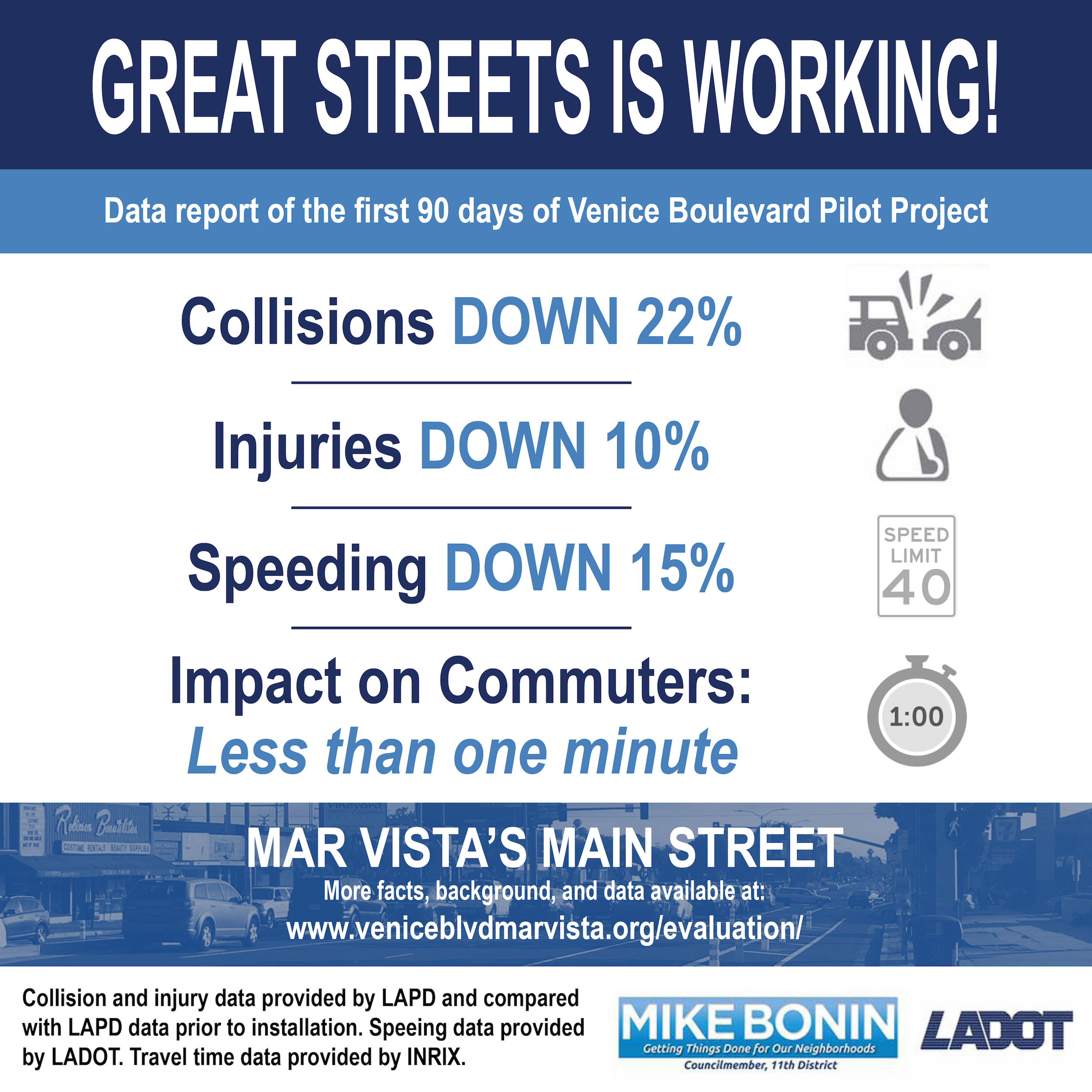
Tonight: Mar Vista Council to Again Vote on Venice Blvd Safety Project
September 12, 2017